"Termes": Roboter-Crew arbeitet wie Termitenvolk
Archivmeldung vom 18.02.2014
Bitte beachten Sie, dass die Meldung den Stand der Dinge zum Zeitpunkt ihrer Veröffentlichung am 18.02.2014 wiedergibt. Eventuelle in der Zwischenzeit veränderte Sachverhalte bleiben daher unberücksichtigt.
Freigeschaltet durch Thorsten Schmitt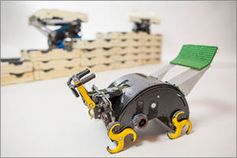
Inspiriert durch Termiten, die durch indirekte Kommunikation ihre Umgebung modifizieren, haben Forscher der Harvard University eine autonome Roboter-Crew entwickelt. So bedarf es nur einer beliebigen Anzahl von Robotern ohne übergeordneter Kontrolle, die dadurch kooperieren, indem sie ihre Umwelt verändern.
Das System "Termes" zeigt, dass ein kollektives System von Robotern dreidimensionale Gebilde, wie Türme, Schlösser und Pyramiden errichten kann, ohne dafür eine zentrale Kommandostelle oder festgeschriebene Rollen der einzelnen Mitglieder zu benötigen. Dabei bilden sie eigenständig Treppenaufgänge, um höhere Stockwerke zu erreichen oder fügen Bausteine hinzu, falls sie benötigt werden. In Zukunft könnten solche Systeme für Sandsackabsperrungen bei Überflutungen oder einfacher Konstruktionsarbeiten am Mars verwendet werden.
"Das, was wir von den Termiten als Inspirationsquelle mitnahmen, war die Idee, dass man etwas wirklich kompliziertes tun kann, ohne dafür einen Supervisor zu benötigen und ohne, dass jeder darüber diskutiert, was nun zu geschehen hat", so Radhika Nagpal, einer der Projektleiter. Und der Chefautor der Studie Justin Werfel schreibt: "Es ist nicht die Königin, die Instruktionen gibt. Keiner der Termiten weiß, was der andere gerade tut oder wie der Gesamtstand der Bauarbeiten ist."
Stattdessen vertrauen Termiten dem Konzept der Stigmergie. Dieses Prinzip beschreibt eine besondere Form der Koordination von Kommunikation in einem dezentral organisierten System, das eine große Anzahl von Individuen umfasst. Dabei kommunizieren die Individuen des Systems nicht unmittelbar, sondern nur indirekt miteinander, indem sie ihre lokale Umgebung modifizieren. Das gemeinsam Erstellte wird gleichsam zum Auslöser von Anschlussaktivitäten und zur allgemeinen Anleitung dafür, wie mit dessen Erstellung fortzufahren ist.
Skalierbarkeit künstlicher Intelligenz
Auch bei den Robotern verhält es sich schlussendlich so. Jeder der Roboter verrichtet seine Arbeit im Bauprozess gleichzeitig mit den anderen - ohne zu wissen, wer noch am Bauprozess beteiligt ist. Auch wenn ein Roboter defekt ist beziehungsweise ausscheiden muss, beeinflusst das die anderen Roboter nicht. Das heißt auch, dass es egal ist ob die Instruktionen von fünf oder 500 Robotern ausgeführt werden. Damit ist das Termes-System ein wichtiger Beweis für die Skalierbarkeit künstlicher Intelligenz.
Derzeit sind bei Robotersystemen noch eher zentrale Organisationen in Mode, die von einem Supervisor abhängig sind. Diese Systeme haben den Vorteil, die Effizienz der Gruppe zu steigern und schnell Probleme zu lösen. Jedoch wird das Operieren umso schwieriger, je höher die Anzahl der Roboter ist. "Am Ende des Weges könnte die Lösung ein Kompromiss zwischen dezentralem und zentralem Weg sein. Nun haben wir einen extremen Standpunkt der Skala geprüft, wie bei den Termiten. Und es hat sich herausgestellt, dass er vorzüglich funktioniert", meint Nagpal.
Quelle: www.pressetext.com/Christian Sec